
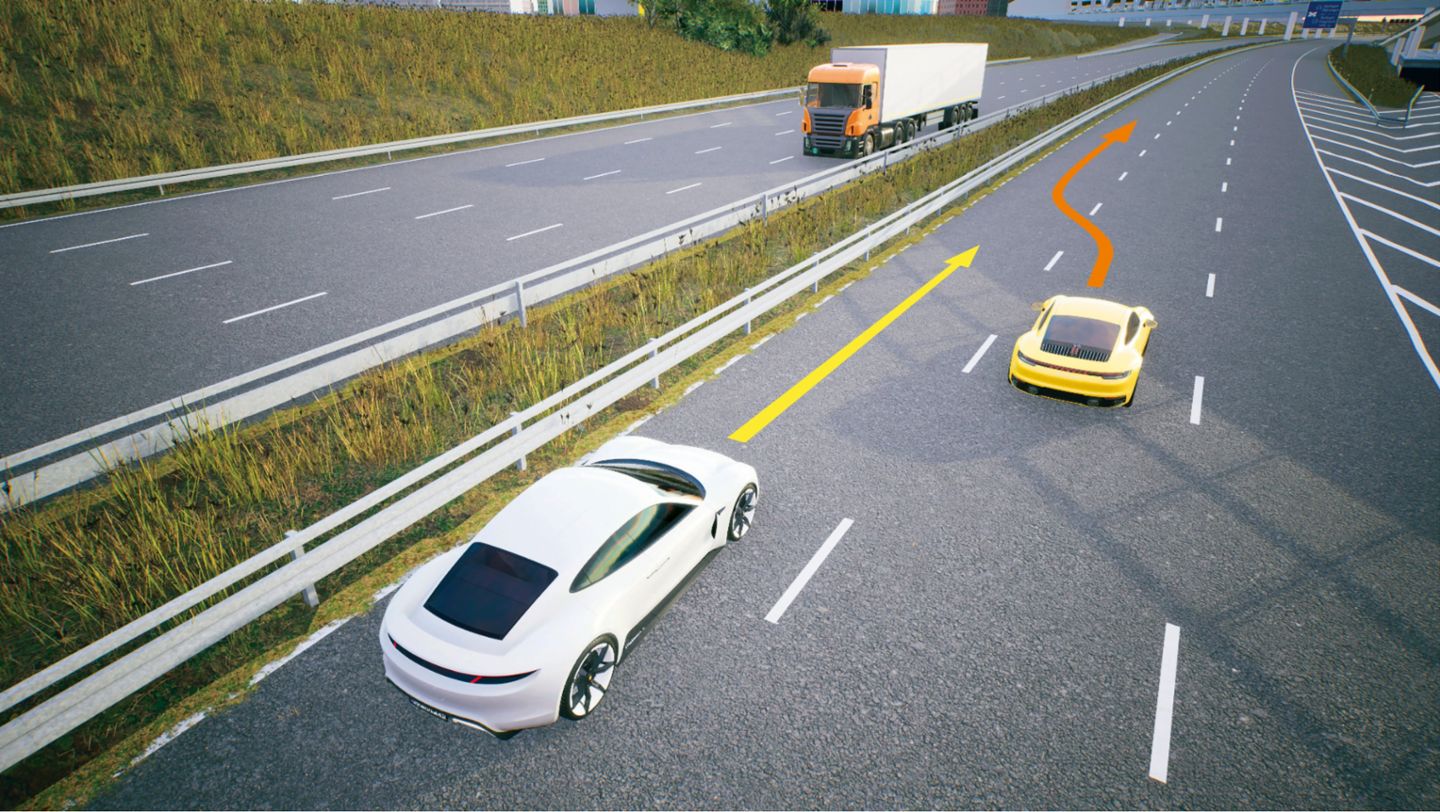
Ein Fahrzeug überholt und schert mit zu geringem Abstand wieder ein – in solchen Momenten kommt es oft zu Beinaheunfällen. Heute verhindert der Fahrer meist das Schlimmste, indem er bremst oder ausweicht. Das autonom fahrende Fahrzeug von morgen muss in kritischen Momenten ebenfalls sicher reagieren, weshalb Porsche Engineering sie heute schon intensiv in Simulationen durchspielt.



Dabei erhöhen die Ingenieure gezielt die Kritikalität, zum Beispiel indem sie den Abstand zwischen den Fahrzeugen verringern. „Wir bauen einen vollständigen Katalog von kritischen Szenarien auf, mit dem wir Fahrerassistenzsysteme und Funktionen für das hochautomatisierte Fahren absichern können“, erklären Dr. Joachim Schaper, Leiter KI und Big Data bei Porsche Engineering und Tille Karoline Rupp, Verantwortliche für Simulation bei Porsche Engineering.
„Wir entwickeln gerade ein Verfahren, das Verkehrsteilnehmer auch dann wiedererkennt, wenn sie länger nicht zu sehen waren.“ Leon Eisemann Doktorand und Spezialist für Bilderkennung bei Porsche Engineering
Die virtuellen Tests sind Teil des Forschungsprojektes AVEAS (Absicherungsrelevante Verkehrssituationen erheben, analysieren, simulieren), an dem neben Porsche Engineering weitere 20 Partner beteiligt sind, darunter mehrere Fraunhofer-Institute und das Karlsruher Unternehmen understand.ai.
Simulierbare Szenarien
AVEAS will eine große Hürde auf dem Weg zum autonomen Fahren beseitigen: fehlende Daten. Um Funktionen für das hochautomatisierte Fahren abzusichern, müssten theoretisch Milliarden von Testkilometern gefahren werden. Weil dies einen enormen zeitlichen und finanziellen Aufwand darstellen würde, ergänzt man die realen Fahrten durch Fahrten in der Simulation. Doch das ist gerade bei kritischen Verkehrssituationen schwierig, da es an realen Basisdaten für die Simulation mangelt – schließlich kommt es im normalen Verkehrsgeschehen selten zu Grenzsituationen. Diese Lücke soll AVEAS schließen. Ziel des Projekts ist es, Testfahrten automatisiert auszuwerten und die kritischen Verkehrssituationen als simulierbare Szenarien aufzubereiten.
Porsche Engineering steuert dazu einige entscheidende Bausteine bei. Für dieTestfahrten wird zum Beispiel ein JUPITER-Versuchsfahrzeug (Joint User Personalized Integrated Testing and Engineering Resource) zur Verfügung gestellt. Es ist mit Kameras, Radar- und Lidar-Sensoren ausgestattet und überträgt seine Messdaten in die Cloud. Auch die Auswertung übernimmt Porsche Engineering: Algorithmen erfassen automatisch den Straßenverlauf, die Position der anderen Verkehrsteilnehmer und ihr Verhalten. Die dabei eingesetzten Machine-Learning-Methoden werden ständig verfeinert. „Wir entwickeln gerade ein Verfahren, das Verkehrsteilnehmer auch dann wiedererkennt, wenn sie länger nicht zu sehen waren, zum Beispiel, weil ein Lkw sie verdeckt hat“, sagt Leon Eisemann, Doktorand und Spezialist für Bilderkennung bei Porsche Engineering.
Das erfasste Verkehrsgeschehen wird in standardisierten Dateiformaten wie ASAM OpenDRIVE (logische Beschreibung des Straßennetzes) oder ASAM OpenLABEL (Objekte und deren Dynamik) gespeichert. So kann AVEAS auch Input für andere Projekte liefern, wie beispielsweise die Streckenmodellierung. In einem zweiten Schritt wählen Algorithmen die kritischen Verkehrssituationen aus, indem sie zum Beispiel auf geringe Abstände oder starke Verzögerungskräfte achten.
„Wir bauen einen vollständigen Katalog von kritischen Szenarien auf, mit dem wir Fahrerassistenzsysteme und Funktionen für das hochautomatisierte Fahren absichern können.“ Dr. Joachim Schaper Leiter KI und Big Data bei Porsche Engineering und Tille Karoline Rupp Verantwortliche für Simulation bei Porsche Engineering
„Wobei das relevante Kritikalitätsmaß immer von der Fahrfunktion abhängt, die später getestet werden soll“, betont Nicole Neis, Doktorandin im Bereich Simulation bei Porsche Engineering. Soll zum Beispiel ein automatischer Abstandstempomat (Adaptive Cruise Control, ACC) abgesichert werden, wäre eine scharfe Bremsung vor einem Stauende ein relevantes kritisches Szenario. Auch Umgebungsfaktoren können kritische Szenarien auslösen. Nähert sich das Fahrzeug zum Beispiel einem Tunnelende, blendet das Gegenlicht möglicherweise die Bordkameras.
Solche Verkehrssituationen markiert der Auswahlalgorithmus ebenfalls, damit sie für die Absicherung von Fahrfunktionen verwendet werden können – schließlich soll das autonome Fahrzeug später so besonnen reagieren wie ein menschlicher Fahrer, etwa indem es die Geschwindigkeit verringert oder andere Sensoren priorisiert. Zunächst bestehen die (simulierbaren) Fahrszenarien aus den Positionsdaten der Verkehrsteilnehmer im Zeitverlauf; Experten sprechen von einer „trajektorienbasierten“ Beschreibung. Um ein Fahrszenario später in der Simulation variieren zu können, muss es abstrakt beschrieben werden – also „manöverbasiert“. Dafür leitet man aus den individuellen Trajektorien Meta-Vorgänge ab, zum Beispiel „Fahrzeug stoppt an der Kreuzung und fährt wieder an“. Dieses Szenario lässt sich dann an einem beliebigen Startpunkt in eine virtuelle Strecke einfügen und verändern.
Erweiterung des Testraums
Die virtuellen Testfahrten finden in der intern entwickelten Simulationsumgebung statt, dem sogenannten PEVATeC SimFramework (Porsche Engineering Virtual ADAS Testing Center Simulation Framework). In der digitalen Welt lässt sich die reale Fahrt nachstellen (resimulieren) und dann gezielt verändert durchspielen. „Bei diesem sogenannten Szenario-Sampling werden die realen kritischen Situationen systematisch modifiziert und somit der virtuelle Absicherungstestraum künstlich erweitert“, erklärt Rupp.
„Das relevante Kritikalitätsmaß hängt immer von der Fahrfunktion ab, die später getestet werden soll.“ Nicole Neis Doktorandin im Bereich Simulation bei Porsche Engineering
Ein Einschervorgang etwa lässt sich viele Tausend Mal mit unterschiedlichen Parametern wiederholen: mit einer höheren Einschergeschwindigkeit, einem zeitlich kürzeren Abstand (Time Headway) oder widrigen Umweltbedingungen wie einer nassen Straße. Durch diese gezielte Variation der Parameter lassen sich auch Testszenarien erschaffen, die allein aus Sicherheitsgründen real nicht gefahren werden können – man denke an eine Vollbremsung vor einem Stauende.
Im letzten Schritt werden die synthetischen Grenzszenarien verwendet, um die gewünschte Fahrfunktion abzusichern und zu optimieren. Dafür konstruiert Porsche Engineering einen digitalen Zwilling des JUPITER-Testfahrzeugs. „Der ‚Digital JUPITER‘ verfügt über die gleichen Schnittstellen und Sensoren wie das echte Fahrzeug“, erklärt David Hermann, Doktorand und Fachprojektingenieur im Bereich Simulation bei Porsche Engineering. „Alle Funktionen lassen sich eins zu eins testen.“ Porsche Engineering wird den Digitalen JUPITER nutzen, um im Rahmen von AVEAS einen Abstandstempomaten und eine Einparkfunktion (Reverse Assist) zu evaluieren und optimieren.
Erste Patente angemeldet
Damit reale und virtuelle Testfahrt wirklich deckungsgleich sind, braucht es viel Erfahrung – auch in der analogen Welt. „Gefragt ist ein tiefes Verständnis dafür, wie reale Technik und Simulation zusammenhängen“, betont Schaper. Ein virtuelles Fahrzeug muss zum Beispiel wie das analoge Vorbild auf verschiedene Fahrbahnoberflächen reagieren. Das im Dezember 2021 gestartete Projekt hat schon erste Ergebnisse geliefert. „Viele Glieder der Prozesskette sind vorhanden, die Versuchsfahrten laufen, einige Patente sind bereits angemeldet“, sagt Michael Strobelt, der die Beteiligung von Porsche Engineering an AVEAS koordiniert. Allerdings bringt die Grundlagenarbeit auch Herausforderungen mit sich. „Die Realität in ihrer hohen Variabilität abbilden zu können, ist anspruchsvoll“, betont Doktorand Eisemann. Erkennungsalgorithmen müssten zum Beispiel Fahrzeuge aus aller Welt identifizieren können – nicht nur deutsche. „Außerdem spielt das Schnittstellenmanagement eine große Rolle“, ergänzt Doktorandin Neis.








Da die AVEAS-Partner Daten aus unterschiedlichen Quellen beitragen, ist für den Austausch eine genaue Abstimmung nötig. Das Karlsruher Institut für Technologie liefert zum Beispiel Luftbilder von Straßen, die ebenfalls in die Konstruktion der digitalen Szenarien einfließen sollen. AVEAS läuft noch bis Ende 2024. Dann soll eine skalierbare Pipeline für die Auswertung von Fahrszenarien stehen – und ein Katalog mit vielen Hunderttausend kritischen Szenarien. Beides könnte die Entwicklungsarbeit in Zukunft stark beschleunigen. Rupp beschreibt die langfristige Vision so: „Schon während der Messfahrt werden Szenarien generiert und sofort in der Simulation zur Optimierung der Fahrfunktion verwendet.“ Nach der Absicherung könnte dann ein entsprechendes Update Over-the-Air ins Fahrzeug übertragen werden.
Streckenmodellierung - Präzises Abbild der Welt
Für Simulationen wird eine Welt benötigt, in der sich die Verkehrsteilnehmer bewegen und mit der sie interagieren können. „Diese Streckenmodelle sind ein grundlegender Bestandteil jeder ADAS/AD-Simulation – ohne Streckenmodell kein virtueller Fahrversuch“, sagt Tille Karoline Rupp, Verantwortliche für Simulation bei Porsche Engineering. Streckenmodelle, im Fachjargon Szene genannt, beschreiben sowohl den Fahrbereich (Straße, Parkraum) als auch die Umgebung. Sie bestehen aus einem mathematischen Modell des Straßennetzes im OpenDRIVE-Format und einem 3D-Modell, das exakt Aussehen und Material der Objekte beschreibt. Digitale Karten, wie sie kommerzielle Navigationssysteme nutzen, sind dafür nicht präzise und detailliert genug. „Es fehlen zum Beispiel Informationen über Breite der Spuren und Fahrbahnmarkierungen“, erklärt Tobias Watzl, Entwicklungsingenieur im Bereich Simulation und verantwortlich für die Streckenmodellierung. Je nach Aufgabe werden hochauflösende Karten, frei verfügbare OpenStreetMap-Karten, Höhenmodelle und vieles mehr kombiniert.

„Um die Vielzahl an benötigten Testkilometern in einem angemessenen Zeitrahmen virtuell abbilden zu können, arbeiten wir an einem eigenen, hochgradig automatisierten Streckenmodellierungsprozess“, ergänzt Rupp. Hierbei wird der Automatisierungsgrad im Erstellungsprozess stetig erhöht. Im Rahmen des AVEAS-Projektes speisen die eingesetzten JUPITER-Versuchsfahrzeuge Messdaten in den Streckenmodellierungsprozess ein. Sie tasten mit ihren Lidar-Sensoren die Umgebung ab und übertragen die resultierenden Punktwolken in die Cloud. Da Fahrbahnmarkierungen ein anderes Reflexionsverhalten haben als Asphalt, lassen sie sich in den Lidar-Daten gut identifizieren. Spezielle Algorithmen berechnen aus den Einzelmarkierungen eine durchgehende Gesamtlinie (dieser Prozess funktioniert auch, wenn einzelne Markierungen fehlen). Das Ergebnis ist ein präzises „georeferenziertes“ Abbild einer echten Straße im OpenDRIVE-Format. Dem stehen „generische“ Streckenmodelle gegenüber, die kein reales Vorbild haben (Beispiel: zehn Kilometer zweispurige Autobahn). Die Streckenmodellierung erfordert hohe Präzision. Die ermittelte Straßengeometrie muss auf den Zentimeter genau sein, sonst würden zum Beispiel die Fahrzeugabstände bei simulierten Spurwechseln später nicht stimmen. Eine Herausforderung: Da Straßen im OpenDRIVE-Format als mathematische Funktionen beschrieben sind, können Sprungstellen entstehen, die in der Simulation als „Knick“ in der Straße erscheinen würden. Solche Punkte müssen interpoliert werden. „Der digitale Zwilling fährt eine Strecke oft mehrere Hunderttausend Mal – da muss jedes Detail stimmen“, betont Watzl.
Zusammengefasst
Porsche Engineering arbeitet im Forschungsprojekt AVEAS mit Partnern daran, kritische Verkehrssituationen mit KI-Hilfe automatisiert in Sensordaten zu erkennen und in einer Datenbank abzulegen. Sie werden zudem variiert, um mehr Testfälle zu erzeugen. Danach werden die Szenen in eine Simulation überführt und dienen dazu, Fahrerassistenzsysteme und Funktionen für das hochautomatisierte Fahren abzusichern.
Info
Text erstmals erschienen im Porsche Engineering Magazin, Ausgabe 2/2023
Text: Constantin Gillies
Copyright: Alle in diesem Artikel veröffentlichten Bilder, Videos und Audio-Dateien unterliegen dem Copyright. Eine Reproduktion oder Wiedergabe des Ganzen oder von Teilen ist ohne die schriftliche Genehmigung der Dr. Ing. h.c. F. Porsche AG nicht gestattet. Bitte kontaktieren Sie newsroom@porsche.com für weitere Informationen.




.png/jcr:content/MicrosoftTeams-image%20(2).png)