
高度自动化驾驶所涉及的功能,必须通过仿真方法接受密集的验证。在 AVEAS 研究项目中,保时捷工程公司致力于借助人工智能,从传感器数据中自动识别高风险交通状况,并将其存储在数据库中。以这种方式生成的路线模型和交通状况也是多种多样的,以便为虚拟验证生成更多的测试案例。



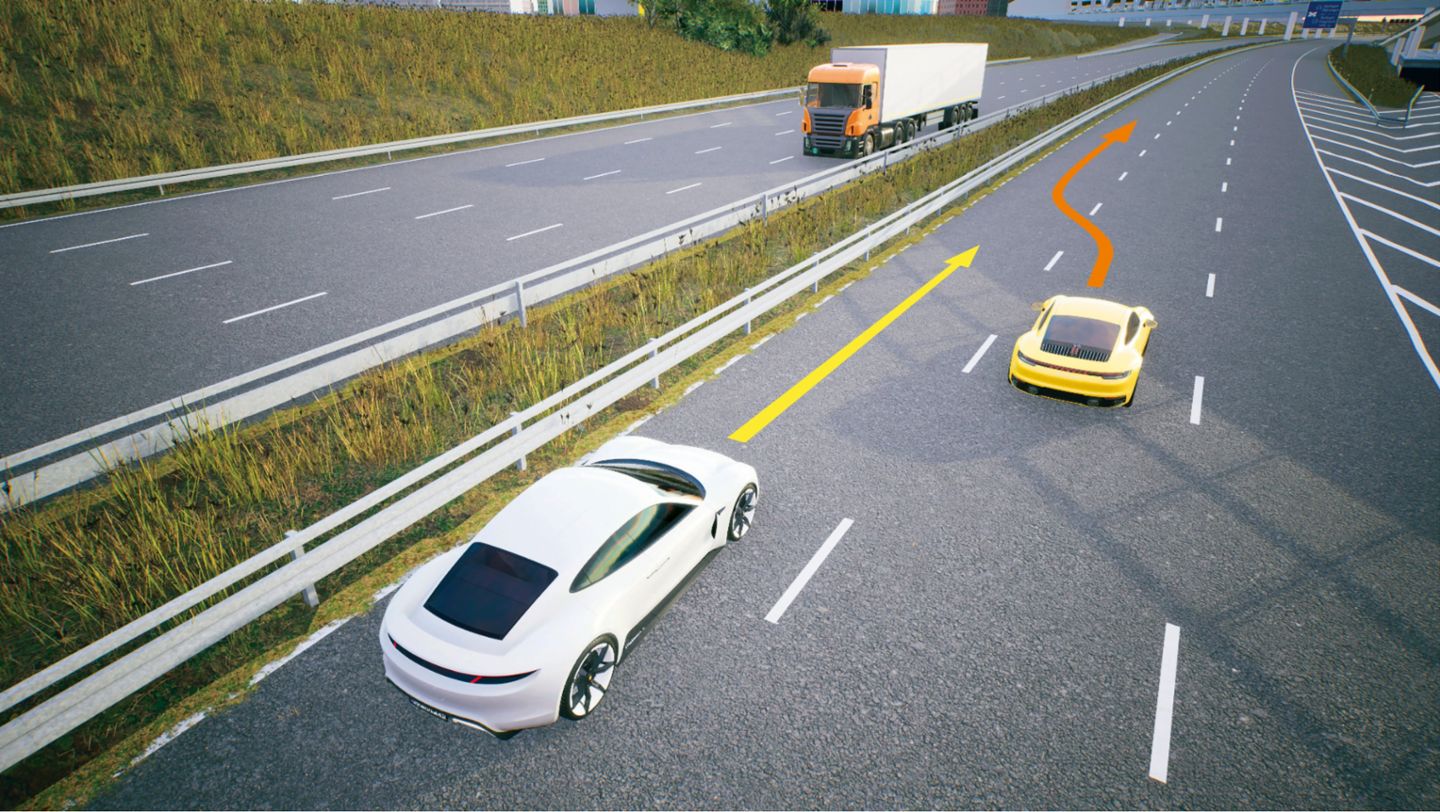
车辆超车后,又在小车距下重新变道切入——这常常可能导致险情。如今的驾驶者通常会选择刹车或转向,以避免发生最坏的情况。而未来的自动驾驶汽车也必须在高风险时刻作出安全的反应,因此,保时捷工程公司现就已开始采用仿真方式进行深入研究。在这类过程中,工程师们常有意提高风险度,例如进一步缩短车距。“我们正在建立一个完整的高风险场景目录,以验证高度自动化驾驶的各种驾驶辅助系统和功能。”保时捷工程公司人工智能和大数据主管 Joachim Schaper 博士和保时捷工程公司仿真工作负责人 Tille Karoline Rupp 解释说。
“我们目前正在开发一种方法,可以在脱离视野一段时间后,重新辨认出之前曾见过的道路使用者。” 保时捷工程公司博士生兼图像识别专家 Leon Eisemann

虚拟测试属于研究项目 AVEAS(评估、分析、仿真和验证相关的交通状况)的一部分;这个项目涉及保时捷工程公司与其他 20 个合作伙伴,包括若干个弗劳恩霍夫研究所以及位于德国卡尔斯鲁厄的 understand.ai 公司。
可仿真的场景
AVEAS 旨在清除通往自动驾驶之路上的一个主要障碍:缺乏数据。为了确保高度自动化驾驶的各种功能,理论上必须进行数十亿千米的行驶测试。因为这将花费大量时间和金钱,所以需要倚靠仿真行程来对真实行程加以补充。但是,在涉及高风险交通状况时,这一点尤其困难,因为缺乏真实的基本数据来进行仿真——毕竟,在正常交通行车中,很少会出现极限场景。AVEAS 正是旨在填补这一空白。这个项目的目的在于自动评估试驾过程,并将高风险交通状况制作成可仿真的场景备用。

保时捷工程公司正在为此贡献一些关键模块,例如提供用于试驾的 JUPITER(Joint User Personalized Integrated Testing and Engineering Resource,联合用户个性化集成测试和工程资源)测试车辆。车辆中配备有摄像头、雷达和激光雷达传感器,并会将其测量数据传输到云端。保时捷工程公司还负责评估工作:算法会自动采集道路走向、其他道路使用者的位置及行为。
此处所使用的机器学习方法正在不断得到完善。“我们目前正在开发一种方法,可以在脱离视野一段时间之后,例如被一辆卡车遮挡,重新辨认出之前曾见过的道路使用者。”保时捷工程公司博士生兼图像识别专家 Leon Eisemann 说。采集到的交通事件会被储存为标准化的文件格式,例如 ASAM OpenDRIVE(路网逻辑描述)或 ASAM OpenLABEL(对象及其动态)。由此,AVEAS 也可以为其他项目提供输入数据,例如路线建模。
在第二步中,算法将选择高风险交通状况,例如小车距或大减速力。“其中,哪些高风险应对措施至关重要,总是取决于之后要测试的驾驶功能。”保时捷工程公司仿真部门博士生 Nicole Neis 强调。举例来说,如果要验证自适应巡航控制(Adaptive Cruise Control,ACC)系统,那么在堵车队尾进行急刹车将是一个重要的高风险场景。
“我们正在建立一个完整的高风险场景目录,以验证高度自动化驾驶的各种驾驶辅助系统和功能。” 保时捷工程公司人工智能和大数据主管 Joachim Schaper 博士与保时捷工程公司仿真工作负责人 Tille Karoline Rupp
环境因素也能引发高风险场景。例如,当车辆接近隧道尽头时,迎面而来的光线可能会使车载摄像头的图像变成一片空白。选择算法同样会标记这类交通情况,以用来验证驾驶功能——毕竟,自动驾驶汽车日后也应该像人类驾驶者一样谨慎地做出反应,例如降低速度或优先考虑其他传感器。

首先,(可仿真的)驾驶场景由道路使用者在一段时间内的位置数据组成;专家行话是“基于轨迹”的描述。为能在之后的仿真中更改驾驶场景,必须对其进行抽象描述——即“基于操控”。为此,综合各条轨迹,便可以推导出元过程,例如“车辆在十字路口停止然后重新起步”。之后,可以将这一场景插入到一条虚拟路线中的任意起点,并加以更改。
测试空间扩展
虚拟试驾在内部开发的仿真环境中进行,即所谓的 PEVATeC SimFramework(Porsche Engineering Virtual ADAS Testing Center Simulation Framework,保时捷工程虚拟 ADAS 测试中心仿真框架)。在数字世界中,可以重建(二次仿真)真实行程,然后做出有针对性的更改。“在这个被称作‘场景采样’的过程中,可以系统性地对真实的高风险情况加以修改,从而人工扩展虚拟验证测试空间。”Rupp 解释说。
“哪些高风险应对措施至关重要,总是取决于之后要测试的驾驶功能。” 保时捷工程公司仿真部门博士生 Nicole Neis
例如,一个变道切入过程可以使用不同的参数重复成千上万次:更高的变道切入速度、更短的车头时距或恶劣的环境条件,如潮湿的道路。通过如此有针对性地更改参数,还可以创建出单纯因为安全原因而不允许在现实中实操的测试场景——试想一下在堵车队尾急刹车。

在最后一步中,会使用合成的极限场景,以验证和优化所需的驾驶功能。为此,保时捷工程公司正在构建 JUPITER 测试车辆的数字孪生。“‘数字版 JUPITER’具有与真实车辆相同的接口和传感器。”保时捷工程公司仿真部门博士生兼专业项目工程师 David Hermann 解释说,“所有功能都可以一比一进行测试。”作为 AVEAS 的一部分,保时捷工程公司将使用数字版 JUPITER 来评估和优化自适应巡航控制系统和倒车入库辅助(Reverse Assist)功能。
已申请首批专利
为了使真实和虚拟试驾真正一致,需要大量的经验——包括在类比世界中的经验。“我们需要能深入理解真实技术系统与仿真之间存在什么样的关联。”Schaper 强调说。例如,虚拟车辆必须像类比原型一样,对不同的路面产生不同的反应。这个项目始于 2021 年 12 月,目前已取得了初步成果。“过程链中的许多环节已经到位,试驾正在进行中,一些专利也已提交申请。”负责协调保时捷工程公司参与 AVEAS 项目的 Michael Strobelt 介绍道。然而,基础工作也会带来一些挑战。“想要反映高度多变的现实,是一项艰巨的任务。”博士生 Eisemann 强调说。例如,识别算法必须能够识别来自世界各地的车辆,而不仅仅是德国车。“此外,接口管理的作用也相当重要。”博士生 Neis 补充道。








由于 AVEAS 的合作伙伴所提供的数据分别来自不同的来源,因此精确协调在交流过程中也是不可或缺的。例如,卡尔斯鲁厄理工学院所提供的道路航拍照片,也将用于数字场景的构建。AVEAS 将运行至 2024 年底,届时将形成一个可扩展的管道,可用于评估驾驶场景——并有一个包含数十万种高风险场景的目录。两者都可以大大加快未来的开发工作。Rupp 如此描述长期愿景:“在测量驾驶过程中,已完成了场景生成,然后就可将其立即用于仿真,以优化驾驶功能。”在验证完成后,相应的更新即可通过无线方式传输到车辆。
路线建模 - 世界的精确映像
要进行仿真,就需要一种可让各个道路使用者移动和互动的环境。“这些路线模型是一切 ADAS/AD 仿真的基本组成部分——没有路线模型,就没有虚拟驾驶测试。”保时捷工程公司仿真工作负责人 Tille Karoline Rupp 说。路线模型,在技术术语中被称为“情景”,它既描述了驾驶区域(道路、泊车空间),也描述了周围环境。它们包括一个 OpenDRIVE 格式的路网数学模型,以及一个可精确描述各种物体外观和材质的三维模型。
在这方面,商业导航系统级别的数字地图还不够精确详细。“例如,其中缺少关于车道宽度和车道标线的信息。”仿真部门负责路线建模的开发工程师 Tobias Watzl 解释说。根据任务的不同,可能会结合使用高分辨率地图、免费开源的 OpenStreetMap 地图、高程模型以及其他诸多资源。“为了能够在合理的时间范围内,虚拟映射所需的大量测试公里数,我们正在研究我们的自主高度自动化路线建模过程。”Rupp 补充说。这一创建过程的自动化程度正在不断提高。

在 AVEAS 项目中,JUPITER 测试车辆用于将测量数据输入路线建模过程。它们用激光雷达传感器扫描周围环境,并将得到的点云传输到云端。道路标线具有与沥青不同的反射特性,因此可轻易在激光雷达数据中识别出来。特殊算法可基于各标线计算出一条连续的完整曲线(即使个别标线标记缺失,也能有效完成这一过程)。最终可以得到 OpenDRIVE 格式的、真实道路的精确“地理坐标”映像。这与没有真实原型(例如长十公里的双车道高速公路)的“通用”路线模型形成对比。
路线建模需要高精确度。确定的道路几何形状必须精确到厘米,否则可能导致各种问题,例如之后在变道仿真过程中的车距不正确。这是一个挑战:由于道路是以 OpenDRIVE 格式描述为数学函数的,因此可能会出现跳跃间断点,这些跳跃间断点在仿真中会显示为道路的“断裂点”,因而必须对此类点进行插补。“数字孪生经常会将一条路线行驶几十万次——每一处细节都必须准确无误。”Watzl 强调。
综述
在 AVEAS 研究项目中,保时捷工程公司正在与诸多合作伙伴合作,借助人工智能,从传感器数据中自动识别高风险交通状况,并将其存储在数据库中。此外,它们也是多种多样的,以生成更多测试案例。之后,这些情景将被转移到仿真中,用于验证高度自动化驾驶的各种驾驶辅助系统和功能。
信息
本文初刊于《保时捷工程杂志》2023 年第 2 期。
文:Constantin Gillies
Copyright: All images, videos and audio files published in this article are subject to copyright. Reproduction in whole or in part is not permitted without the written consent of Dr. Ing. h.c. F. Porsche AG. Please contact newsroom@porsche.com for further information.




.jpg/jcr:content/b-Autonomes%20Fahren%20in%20der%20Werkstatt%20(2).jpg)