
1947 entwickelte Porsche den Typ 360, besser bekannt als Cisitalia-Rennwagen. Dieser wurde nicht nur durch seinen Zwölfzylinder-Kompressormotor und den konsequenten Leichtbau zur Legende, sondern auch wegen seines zuschaltbaren Allradantriebes. Dieser Konstruktion lag erneut der Gedanke zugrunde, dass die Antriebsleistung in Kurven oder auf Fahrbahnen mit niedrigen Reibwerten vollständiger und sicherer in Vortrieb umgesetzt werden kann.
1981 begann bei Porsche die zivile Allrad-Ära. Auf der IAA in Frankfurt präsentierte das Unternehmen die Studie eines 911 Turbo Cabriolets mit Allradantrieb. 1984 griff Porsche die Idee erneut auf und konzipierte den Typ 953 für die Rallye Paris-Dakar mit zuschaltbarem Allradantrieb, der auch prompt den Gesamtsieg herausfuhr. Die Erfahrungen mit dem 953 führten zum Bau des Supersportwagens 959, der 1985 vorgestellt wurde und seiner Zeit in seiner kompletten Technologie weit voraus war. So legte er mit dem per Lamellenkupplung zuschaltenden Vorderradantrieb und der ebenfalls per Lamellenkupplung aktivierbaren Hinterachs-Quersperre das Grundkonzept für den Porsche-Allradantrieb fest. Diese Längs- und Quersperren konnten sowohl manuell als auch automatisch eingeschaltet werden. Das Konzept hat im PTM bis heute Bestand. Der Doppelsieg des Porsche 959 bei der Paris-Dakar 1986 ist Legende.
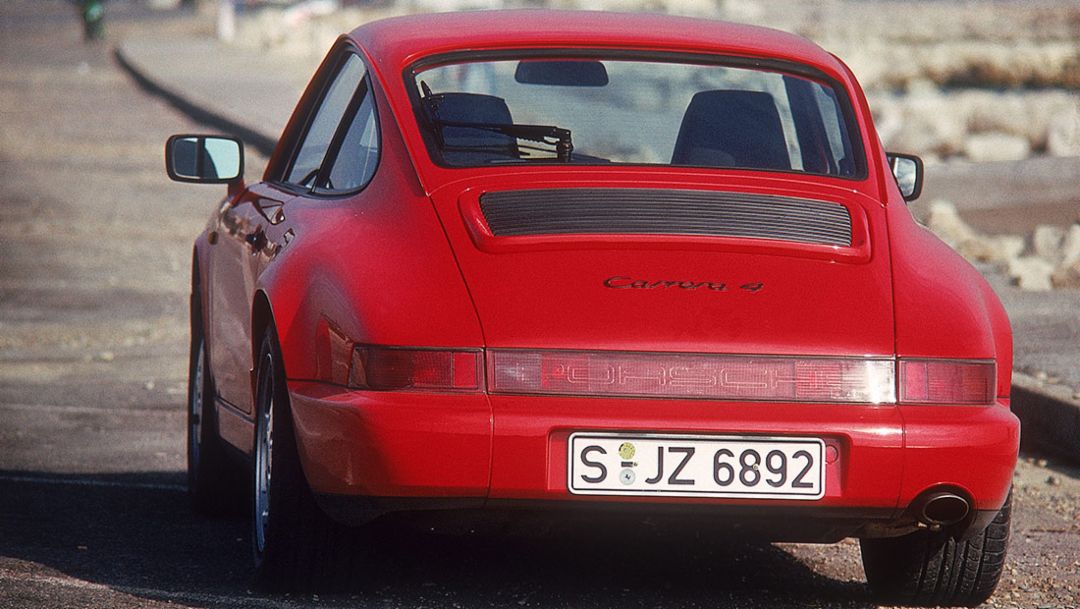
911 Carrera 4: Vor 30 Jahren debütierte der erste Elfer mit Allradantrieb
Als Porsche 1988 den 911 des Typs 964 vorstellte, läutete eine Ziffer hinter der Modellbezeichnung eine neue Ära ein: Der 911 Carrera 4 war der erste Seriensportwagen der Marke mit Allradantrieb – in einer wegweisend neuen Form. Porsche nannte die Innovation einen "differenzialschlupfgesteuerten" Antrieb aller vier Räder. Das bedeutet, dass das Antriebsmoment vom Schaltgetriebe aus zuerst zu einem als Planetengetriebe konstruierten Längsverteilergetriebe geleitet und dort – solange die Sperrensteuerung nicht aktiviert ist – stets im gleichen Verhältnis aufgeteilt wird: 69 Prozent für die Hinterachse, 31 Prozent über eine gekapselte Transaxle-Welle nach vorne. Neuartig war die Regelung.
Schlupf an einzelnen Rädern wurde über die ABS-Sensoren erkannt und durch hydraulische Sperren verhindert. Zwei elektronisch geregelte Lamellensperren steuerten den Kraftfluss zur Vorderachse und zwischen den Rädern der Hinterachse. Der Effekt: Traktion und Fahrstabilität, das Fahrverhalten in Kurven sowie Lastwechselreaktionen wurden permanent optimiert.
1994: Neues Allradsystem mit Visco-Kupplung – Hang-on statt permanenter Allrad
Im Jahr 1994 setzte Porsche die Allrad-Entwicklung mit dem 911 Carrera 4 der Generation 993 fort. Auch der 911 Turbo nutzte jetzt erstmals alle vier Räder zur Kraftübertragung. Bei beiden Modellen wechselte Porsche zu einem einfacheren Systemaufbau und brachte damit das damals leichteste Allradsystem auf den Markt. Das System war als so genannter Hang-on-Allrad aufgebaut, bei dem die Hinterachse direkt angetrieben wurde und eine passive Visco-Kupplung bei Drehzahlunterschieden zwischen Hinter- und Vorderachse einen Teil der Antriebskraft zur Vorderachse leitete. Die Visco-Kupplung ersetzte also das Verteilergetriebe samt geregelter Lamellenkupplung für den Vorderachsantrieb. Dadurch fuhr sich der Allrad-911 unter Last prinzipiell heckdominant – ähnlich einem Hecktriebler, jedoch deutlich stabiler. An der Hinterachse kamen ein klassisches Sperrdifferenzial sowie ein Automatisches Brems-Differenzial (ABD) zum Einsatz.
Die Aufgabe der Visco-Kupplung war es, das Antriebsmoment in Abhängigkeit vom Schlupf der Hinterräder automatisch zwischen den Achsen zu verteilen. Das im Allradmodell serienmäßig verbaute ABD erkannte mithilfe der ABS-Sensoren den Antriebsschlupf einzelner Räder und sorgte über das Steuergerät für ein entsprechendes Bremsmoment am durchdrehenden Rad. Bei unterschiedlichen Reibwerten rechts und links wurde die Antriebskraft zunächst durch das Hinterachs-Sperrdifferenzial stufenlos dem Rad mit höherem Kraftschluss zugeteilt. Drehte ein Rad durch, wurde es vom ABD abgebremst und ein Antriebsmoment in Höhe des Bremsmoments auf das gegenüberliegende Rad übertragen. Diese Funktion half dem Fahrer besonders bei witterungsbedingt problematischen Anfahrvorgängen auf nasser oder glatter Fahrbahn.
Auch beim 911 des Typs 996 behielt Porsche dieses Konzept bei, mit dem Unterschied, dass die Visco-Kupplung im Ölbad des Vorderachsgetriebes mitlief und dadurch auch bei hoher Beanspruchung effektiv gekühlt wurde. Aus Gewichtsgründen und um Platz für die Rohre der Wasserkühlung zu schaffen, entfiel bei der 996-Generation das Transaxle-Rohr. Statt der starren Verbindung des motorfesten Getriebes mit dem Vorderachsgetriebe über ein Zentralrohr, erfolgte der Antrieb zur Vorderachse über eine frei liegende Kardanwelle.
2002: Der Cayenne führt das Porsche Traction Management (PTM) ein
Als dritte Baureihe präsentierte Porsche 2002 den Cayenne und mit ihm eine völlig neue Allradtechnik. Das Porsche Traction Management (PTM) leitete im Grundmodus 62 Prozent der Motorkraft an die Hinterräder und 38 Prozent an die Vorderräder. Über eine elektromotorisch betätigte und elektronisch gesteuerte Lamellenkupplung als variable Längssperre konnte das Verteilungsverhältnis je nach Fahrsituation jedoch variiert und damit die Längs- und Querdynamik aktiv beeinflusst werden. Ein Wippschalter ermöglichte zudem das manuelle Zuschalten einer Längssperre für den harten Geländeeinsatz.
Das PTM nahm entscheidenden Einfluss auf die Fahrdynamik des Cayenne. Denn die kennfeldgesteuerte Längssperre und eine optional erhältliche Hinterachs-Differenzialsperre reagierten nicht nur auf mangelnde Traktion an Vorder- oder Hinterachse. Sensoren ermittelten auch die Fahrzeug-Geschwindigkeit, die Querbeschleunigung, den Lenkwinkel oder die Gaspedalbetätigung, damit PTM stets den optimalen Sperrgrad für beide Achsen berechnen konnte und so das jeweils benötigte Antriebsmoment den Achsen zuwies. Das PTM war damit ein vorausschauendes System, das für enorme Agilität bei Kurvenfahrten und für hohe Fahrstabilität beim Spurwechsel sowohl im Hochgeschwindigkeitsbereich als auch bei gemäßigter Fahrt auf Eis und Schnee sorgte.
Das erste PTM für den Porsche 911
2006 hielt das elektronische PTM in angepasster Form Einzug in den 911 Turbo des Typs 997. Kernelement war hier eine elektromagnetisch betätigte Lamellenkupplung, über die die Antriebskraft bei Bedarf zur Vorderachse geleitet wurde. Die Kupplung des 911 Turbo war auf ein Spitzendrehmoment von 400 Newtonmeter ausgelegt, was in der Praxis so gut wie nicht vorkam: Bereits bei 300 Newtonmeter verloren die Vorderräder auf trockener Fahrbahn ihre Haftung und drehten durch.

Mit einer Schaltzeit von längstens 100 Millisekunden war das PTM schneller als die Reaktion eines Motors auf Lastwechsel und als die Wahrnehmung des Fahrers. In der Praxis hieß das: Hohe Agilität auf engen Landstraßen, herausragende Traktion und hohe Fahrsicherheit auch bei extremen Fahrmanövern im Hochgeschwindigkeits-bereich. Um diese fahrdynamischen Aufgaben zu erfüllen, programmierten die Porsche-Entwickler das PTM mit fünf wesentlichen Basisfunktionen, nach denen der Porsche-Allradantrieb im Grundsatz bis heute arbeitet:
Grundmomentenverteilung: Im alltäglichen Fahrbetrieb verteilt die Steuerung das Motormoment in Abhängigkeit von der aktuellen Fahrsituation stufenlos zwischen Vorder- und Hinterachse durch definiertes Einkuppeln des Vorderachsantriebes. Dazu wird der Momentenbedarf an der Vorderachse im Millisekundentakt ermittelt. Erkennt das System beispielsweise einen Spurwechsel, schaltet es geschwindigkeitsabhängig den Vorderradantrieb mehr oder weniger zu. Vor allem bei sehr hoher Geschwindigkeit spürt der Fahrer dies durch einen deutlichen Gewinn an Stabilität.
Vorhaltesteuerung: Anhand typischer Parameter kann das PTM dynamische Fahrzustandsänderungen frühzeitig erkennen und Antriebsschlupf bereits im Vorfeld vermeiden. Beim Start ermittelt das System beispielsweise, wie schnell der Fahrer Gas gibt. Noch bevor der Motor diesen Beschleunigungswunsch in Drehmoment umsetzen kann, schließt die PTM die Lamellenkupplung bereits so weit, dass durchdrehende Räder möglichst vermieden werden. Nur im Extremfall, wenn etwa beide Hinterräder ohne jegliche Traktion auf blankem Eis radieren, gelangt dabei so viel Motormoment an die Vorderräder, dass diese durchdrehen. Damit werden bereits beim Anfahrvorgang alle vier Räder mit der größtmöglichen Antriebskraft beaufschlagt und eine optimale Beschleunigung erreicht. Ein Sonderfall ist der Rennstart per "Launch Control" in Verbindung mit dem PDK-Getriebe. Wird er angefordert, sperrt das PTM bereits vor dem Start die Lamellenkupplung um maximale Traktion zu garantieren.
Schlupfregler: Durch sein hohes Drehmoment kann ein 911 im Zwischenspurt bereits auf nasser Fahrbahnoberfläche die Traktionsgrenze an der Hinterachse erreichen. Auch dabei wird über einen stärkeren Eingriff der Lamellenkupplung mehr Moment und damit Antriebskraft an die Vorderachse geleitet. Der 911 Turbo verfügte 2006 erstmals über diese Erkennung und Regelung der Längsbeschleunigung.
Übersteuerkorrektur: Drängt das Fahrzeug in der Kurve durch Störeinflüsse wie nasses Laub mit dem Heck nach außen, wird zur dynamischen Fahrzeugstabilisierung mehr Antriebskraft an die Vorderachse geleitet. Ein weiterer Vorteil von PTM ist die Berücksichtigung des Lenkwinkels bei der Kraftverteilung an die Vorderachse. Lenkt der Fahrer beim Übersteuern gegen, passt das PTM die Antriebskraft zur Vorderachse an und das Fahrzeug stabilisiert sich noch schneller.
Untersteuerkorrektur: Tendiert der Sportwagen im umgekehrten Fall dazu, über die Vorderräder aus der Kurve zu schieben, reduziert das PTM die Momentenzuteilung an die Vorderachse. Durch die feinfühlige Sensorik reagiert das PTM in beiden Fällen, bevor der Fahrer überhaupt eine Instabilität bemerkt. Das Resultat ist eine schnelle und aktive Stabilisierung des Fahrzeuges für eine zügige und dynamische Kurvenfahrt, da weniger radselektive Bremseneingriffe des Stabilitätssystems PSM erfolgen.
Panamera und Macan mit Allradantrieb wie im Sportwagen
Das PTM des 911 wurde zum Urmodell der Allradantriebe des Panamera, der 2009 seine Weltpremiere feierte, und des Macan, der 2013 als fünfte Porsche-Baureihe auf den Markt kam. Mit jedem Generationswechsel entwickelte sich auch das Porsche Traction Management weiter. 2013 lag beim neuen 911 der Focus auf der Steigerung der Stellgenauigkeit und des übertragbaren Moments an der Vorderachse. Das System mit jetzt elektrohydraulischer Betätigung der komplett neu entwickelten Lamellenkupplung erkennt seither abhängig von der Fahrsituation und dem Fahrerwunsch eine ökonomische Fahrweise und reduziert die Übertragung des Antriebsmoments auf die Vorderachse. Dadurch verringert sich die Verlustleistung. Das PTM unterstützt darüber hinaus in Verbindung mit dem Doppelkupplungsgetriebe PDK das Porsche-typische „Segeln“. Befindet sich das Fahrzeug im antriebslosen Rollen, wird die PTM-Kupplung geöffnet. Dadurch sinkt das Bremsmoment durch das Allradsystem und damit auch der Kraftstoffverbrauch. Aber auch bezüglich Performance bietet das neueste PTM Vorteile. Dank schnellerer und präziserer Kontrolle der Antriebskraft durch die neue Lamellenkupplung ergeben sich Verbesserungen bei Fahrdynamik, Agilität und Fahrstabilität. Die Beschleunigung verbessert sich durch die Übertragung höherer Drehmomente über die Vorderachse, wodurch die gesteigerte Motorleistung auch auf die Straße gebracht werden kann.

Meilensteine der Porsche-Allrad-Entwicklung
Das heutige Porsche Traction Management (PTM) im 911 ist die Inkarnation des sportlichen Allradantriebs. Seine Intelligenz verbessert die Agilität in Kurven, die Stabilität bei hochdynamischen Fahrmanövern und die Traktion. Das PTM ist die vorläufige Spitze einer mehr als 30-jährigen Entwicklungsgeschichte des Allradantriebs in Porsche-Seriensportwagen. Ursprünglich stammt der Porsche-Allradantrieb aus dem Rennsport. 1984 gewann der Typ 953 damit die Rallye Paris-Dakar; 1986 feierte der Supersportwagen 959 mit elektronisch gesteuertem variablen Allradantrieb einen Doppelsieg.
1988: Weltpremiere des gesteuerten Allradantriebs im 911-Serienmodell
Der erste Straßen-911 mit serienmäßigem Allradantrieb feierte 1988 Weltpremiere. Der Porsche 911 Carrera 4 des Typs 964 verteilte die Antriebskraft über ein Planetengetriebe als Mittendifferenzial. Hinzu kamen Lamellensperren zwischen Vorder- und Hinterachse (als Längssperre) und an der Hinterachse (als geregelte Quersperre).
1994: Zweite Generation mit passivem Hang-on-System
Den Allradantrieb der zweiten Generation präsentierte Porsche 1994 im 911 des Typs 993. Das System war als so genannter Hang-on-Allrad aufgebaut, bei dem eine passive Visco-Kupplung erst bei Drehzahlunterschieden zwischen der direkt angetriebenen Hinter- und der Vorderachse einen Teil der Antriebskraft zur Vorderachse weiterleitet. Dieses System wurde nahezu unverändert auch in den 911 Carrera- und 911 Turbo-Modellen der Generation 996 eingesetzt.
2002: Premiere des Porsche Traction Management im Cayenne
Mit dem Cayenne begann 2002 die Ära des Porsche Traction Management. Es handelt sich in dem Fall um einen permanenten Allradantrieb, dessen zentrales Verteilergetriebe die Antriebskraft im Verhältnis 38:62 auf Vorder- und Hinterachse verteilt. Zusätzlich sorgen ein Reduktionsgetriebe und eine elektronisch geregelte Längssperre – dem Einsatzgebiet eines SUV entsprechend – für volle Geländetauglichkeit. Gleichzeitig besticht das erste PTM durch seine fahrdynamischen Fähigkeiten.
2006: Der erste 911 mit PTM
Im 911 Turbo des Typs 997 präsentierte Porsche 2006 eine speziell für Sportwagen weiterentwickelte Version des PTM mit elektronisch gesteuerter und elektromagnetisch betätigter Lamellenkupplung mit Kugelrampenverstärkung. Dieses aktive, vollvariable System verteilt die Antriebskraft zwischen der permanent angetriebenen Hinterachse und der Vorderachse viel schneller und präziser als die passive Visco-Kupplung des Vorgängers. 2008 kam dieses System dann auch in den 911 Carrera 4-Modellen der zweiten 997-Generation zum Einsatz, die in der ersten Generation noch über den Allradantrieb mit Visco-Kupplung verfügten.
2009 und 2013: Panamera und Macan mit 911-Technologie
Ebenfalls über eine geregelte Lamellenkupplung verfügen die Allradantriebe der meisten Panamera-Modelle (ab 2009) und die Systeme aller Macan-Versionen (ab 2013). Die Regelstrategie basiert auf jener des 911 und trägt so zur Sportwagen-typischen, jeweils klassenbesten Fahrdynamik von Panamera und Macan bei.
2013: Aktuelles PTM mit noch mehr Effizienz
Das weiterentwickelte, bisher aktuellste PTM kam erstmals 2013 im 911 Turbo der ersten 991-Generation zum Einsatz. Im Gegensatz zum System des Vorgängers, das bei den 911 Carrera 4-Varianten noch bis zur zweiten Generation des 991 im Jahr 2015 verwendet wurde, kommt eine elektrohydraulische anstelle der elektromechanischen Betätigung der neu entwickelten Lamellenkupplung zum Einsatz. Das hat Vorteile bei der Performance dank schnellerer und präziser Kontrolle der Antriebskraft in Bezug auf Traktion, Fahrstabilität und Lenkbarkeit.


