Bei Porsche Engineering arbeiten die Ingenieure und Software Entwickler weltweit an neusten Technologien für die Zukunft. Zu den wichtigsten Feldern gehört dabei das automatisierte Fahren. Um das Wissen dazu zu bündeln und Synergien zu nutzen, hat das Unternehmen jetzt eine digitale Entwicklungs und KollaborationsPlattform geschaffen: Jupiter (Joint User Personalized Integrated Testing and Engineering Resource). Sie beschleunigt die Entwicklungsarbeit gleich doppelt. Zum einen bietet Jupiter vorgefertigte Software-Module, mit denen sich Ideen zum automatisierten Fahren schnell umsetzen lassen. Zum anderen kann man die Entwicklungsarbeit über die Plattform einfacher auf mehrere Teams verteilen – auch länder übergreifend. „Gerade bei diesem hochkomplexen Thema ist das ein Schlüssel zum Erfolg“, sagt Arathi Pai, Projektleiterin Jupiter bei Porsche Engineering.

Gemeinsam mit ihrem Kollegen Marcel Pelzer hat sie das Projekt Jupiter im November 2019 gestartet. Ihr Ziel: alle Innovationen zum automatisierten Fahren zusammenführen. „Die Experten von Porsche Engineering leisten auf diesem Gebiet an vielen Standorten Pionierarbeit“, erklärt Co-Projektleiter Pelzer. „Um die Werkzeuge und die entwickelten Funktionalitäten noch leichter in unterschiedlichen Projekten nutzen zu können, haben wir den Plattformgedanken vorangetrieben.“
Beschleunigte Entwicklung dank Jupiter
Neben der Software-Seite hat Jupiter auch eine praktische Seite: An den Standorten Bietigheim-Bissingen, Cluj-Napoca und Prag stehen drei mit zusätzlicher Sensorik ausgestattete Testfahrzeuge vom Typ Porsche Cayenne bereit, um neue Funktionen und Algorithmen sofort auf der Teststrecke zu überprüfen. Diese Kombination soll die Arbeit der Entwickler in Zukunft stark beschleunigen. Mithilfe von Jupiter wollen sie neue Ideen schneller in ein sogenanntes Minimum Viable Product (MVP) überführen, also in eine erste funktionsfähige Version der neuen Lösung. Sie ließe sich dann sofort auf der Teststrecke untersuchen und verfeinern. Denkbar wäre sogar, dass ein Kunde Jupiter nutzt, um eine eigene Idee zu überprüfen.
Ziel ist es, in kurzer Zeit einen Proof of Concept zu schaffen – den Beweis, dass eine Idee funktionieren und vielleicht im nächsten Schritt zur Serienreife weiterentwickelt werden kann. „Die Entwickler an den verschiedenen Standorten sollen mit den Funktionalitäten spielen“, so Pai. Ziel sei es nicht nur, das automatisierte Fahren verlässlich und sicher zu machen, sondern auch darüber hinausgehende Funktionen zu entwickeln. „Dinge, an die wir bisher noch nicht gedacht haben“, sagt Pai.
Offenes Programmiergerüst
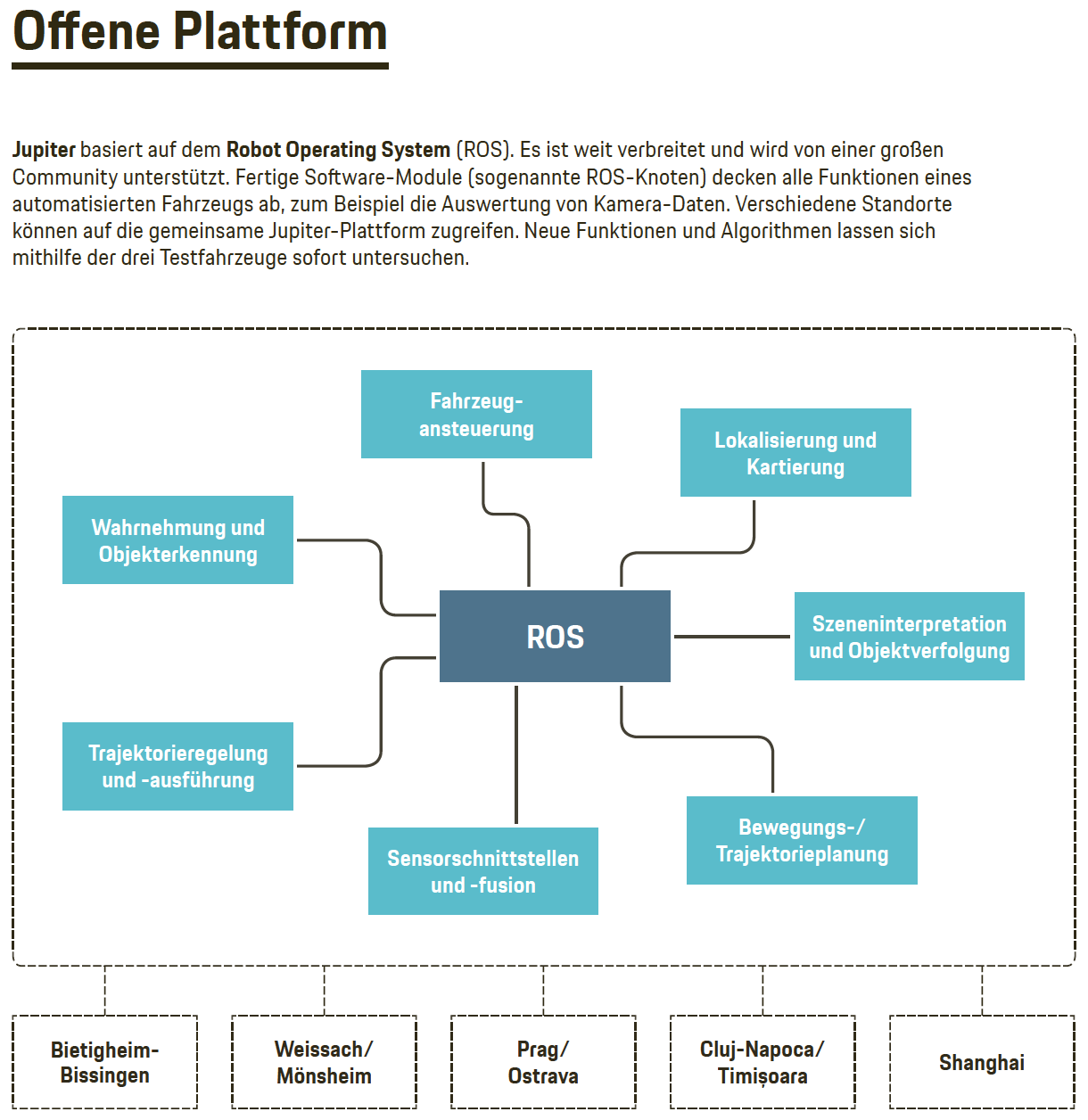
Damit sich die neuen Lösungen in Zukunft leichter von einem Projekt auf ein anderes übertragen lassen, basiert Jupiter auf einem offenen Programmier gerüst: dem Robot Operating System (ROS). Diese OpenSource Lösung ist weit verbreitet und wird von einer großen Community unterstützt, sodass sich bei aufkommenden Problemen schnell Lösungen finden lassen. Darüber hinaus stellt ROS viele vorgefertigte Schnittstellen zur Verfügung, zum Beispiel für Kameras. Sensoren, die ROS unterstützen, lassen sich an einem Testfahrzeug oft in weniger als einer Stunde in Betrieb nehmen.
Kern von Jupiter ist eine Art digitaler Werkzeugkasten. Die Plattform enthält fertige SoftwareModule, die sogenannten ROSKnoten, die alle Funktionen eines automatisierten Fahrzeugs abdecken. Ein Knoten übernimmt beispielsweise die Auswertung der Daten, die von Kameras und anderen Sensoren kommen. Ein weiterer Knoten bestimmt die Position des Fahrzeugs im Raum. Ein anderer trifft Entscheidungen wie das Wechseln der Spur.
In vielen dieser Software-Module kommt Künstliche Intelligenz (KI) zum Einsatz, zum Beispiel im Knoten für die sogenannte InstanzSegmentierung. Er hat die Aufgabe, Objekte in der Umgebung zu erkennen und richtig einzuordnen. Dafür verarbeitet eine KI die Bilder der Bordkameras und umgibt die gefundenen Objekte mit einer Umrandung, „Bounding Box“ genannt. In einem zweiten Schritt werden die Verkehrsteilnehmer einer Gruppe zugeordnet, etwa „Fußgänger“, „PKW“ oder „LKW“.
Perfektionierte Knoten für Funktionalitäten
Diese Klassifizierung gehört zu den großen Herausforderungen beim automatisierten Fahren, denn schon kleinste Details können zu Fehleinschätzungen führen. Ein Fahrrad auf einem Kofferraumträger zum Beispiel könnte ein unausgereifter Algorithmus als fahrendes Zweirad fehlinterpretieren – was das automatisierte Fahrzeug zum Bremsen veranlassen würde. In Zukunft wird Jupiter den Entwicklern perfektionierte ROS-Knoten für die Instanz-Segmentierung und andere Funktionalitäten zur Verfügung stellen.
Gerade beim automatisierten Fahren ist Software nur eine Seite der Medaille. Denn wie gut eine neue Idee tatsächlich ist, zeigt sich erst im Realbetrieb mit den drei Versuchsfahrzeugen. Sie sind über die serienmäßige Sensorik hinaus zum Beispiel mit einem Laserscanner (LiDAR, Light detection and ranging) an Front und Heck ausgestattet. Diese Sensoren erfassen in jeder Sekunde 240.000 Messpunkte und können Objekte in bis zu 250 Metern Entfernung zentimetergenau lokalisieren. Zum LiDAR kommt in den Versuchsfahrzeugen eine Stereo-Kamera hinzu, da optische Systeme dem Laserscanner bei der Erkennung von Objekten aktuell noch überlegen sind.

Ein Vorteil der zusätzlichen Sensorik: Die Entwickler können auf deren Rohdaten zugreifen. „Diese Arbeit auf der Hardware-Ebene ist wichtig, da wir so unabhängiger von der bereits implementierten Serienlösung verfahren können“, erklärt Pelzer. Neben der erweiterten Sensorik haben die Testfahrzeuge auch Hochleistungscomputer mit vielen CPUs (klassische Mikrop rozessoren) und GPUs (Grafikprozessoren) an Bord. Die CPUs sind für die Kommunikation mit den ROS-Knoten zuständig, die GPUs können die Neuronalen Netze für das automatisierte Fahren schnell trainieren und auswerten. Auf externe Rechenleistung in der Cloud zuzugreifen, ist bei den zeitkritischen Anwendungen nicht möglich.

Mit Jupiter untersucht Porsche Engineering bereits neue Ideen wie das personalisierte automatisierte Fahren. Die Vision dahinter: In Zukunft passt sich das Fahrzeug an den Stil seines Fahrers an. Um das zu ermöglichen, würde der Abstandsregeltempomat (Adaptive Cruise Control, ACC) zum Beispiel zunächst das Fahrgeschehen beobachten und dann die Gewohnheiten des Nutzers übernehmen. Fährt dieser sportlich, würde der Algorithmus sich diesem Verhalten anpassen. Mag es der Fahrer dagegen entspannter, würde die Abstandsautomatik dies entsprechend berücksichtigen.
Um einen solchen persönlichen Abstandsregeltempomaten realisieren zu können, müssen die Entwickler zunächst Daten zu unterschiedlichen Fahrweisen sammeln. Dazu wurden Probanden eingeladen, eine standardisierte Testrunde durch die Stadt und über Land zu fahren. Sensoren zeichneten dabei sechs Terabyte Daten auf, die später als Lernmaterial für den personalisierten Abstandsregeltempomaten und künftige Assistenzsysteme dienen sollen.
Effiziente Datenerhebung
Nur mit einem Werkzeug wie Jupiter könnten er und seine Kollegen ein solches Projekt effizient durchführen, betont Pelzer. Denn für die Studie werden sowohl hochpräzise differenzielle GPS-Daten als auch Bussignale und Kamera-Rohdaten benötigt. „Gäbe es drei separate Daten-Pipelines, wäre die zeitliche Synchronisierung sehr aufwendig“, erklärt er. „Jupiter dagegen kann simultan alle Daten loggen und speichern.“ So hilft die Plattform dabei, das selbststeuernde Auto von morgen ein wenig menschlicher zu machen.
Die digitale Drehscheibe nimmt schnell Gestalt an: Rund zwei Jahre nach dem Start sind Basisknoten zum Aufzeichnen aller Sensordaten verfügbar, weitere Funktionen sind prototypisch bereits implementiert und stehen vor der Fertigstellung. Im August 2021 wurden die drei Testfahrzeuge in Dienst gestellt, und im Laufe des kommenden Jahres werden weitere Bausteine der sogenannten OODA-Architektur ergänzt. Die Abkürzung beschreibt die Funktionen Observe (Verarbeitung der Kamera- und LiDAR-Daten), Orient (simultane Positionsbestimmung und Kartierung), Decide (Trajektorieplanung) und Act (Bewegungssteuerung).

Komplett abgeschlossen wird das Projekt Jupiter niemals sein, denn die Modul-Bibliothek wird weiterwachsen. Schon der heutige Stand reicht aus, um Jupiter intensiv einzusetzen – zum Beispiel für die Weiterentwicklung des Abstandsregeltempomaten und der sogenannten Cut-in-Detection, also dem Erkennen von einscherenden Fahrzeugen. So kann Porsche Engineering seinen Kompetenzpool optimal nutzen und neue automatisierte Fahrfunktionen noch schneller qualifizieren und entwickeln.
Info
Text erstmals erschienen im Porsche Engineering Magazin, Ausgabe 1/2022.
Autor: Constantin Gillies
Copyright: Alle in diesem Artikel veröffentlichten Bilder, Videos und Audio-Dateien unterliegen dem Copyright. Eine Reproduktion oder Wiedergabe des Ganzen oder von Teilen ist ohne die schriftliche Genehmigung der Dr. Ing. h.c. F. Porsche AG nicht gestattet. Bitte kontaktieren Sie newsroom@porsche.com für weitere Informationen.




