保时捷工程公司汇聚了来自世界各地的工程师和软件开发人员,致力于研发面向未来的最新技术,而自动驾驶正是当今最重要的领域之一。为了汇集知识并利用协同效应,公司现已创建了一座数字研发和协作平台:Jupiter(Joint User Personalized Integrated Testing and Engineering Resource,联合用户个性化集成测试和工程资源)。它可使开发工作速度倍增。一方面,Jupiter 可提供现成的软件模块,用以快速实施自动驾驶领域的各种构想;另一方面,通过该平台,可以更轻松地在若干团队之间分配研发工作——即使跨越国境也不是问题。“尤其是对于此类高度复杂的课题,这点是取得成功的关键所在。”保时捷工程公司 Jupiter 项目负责人阿拉希·帕伊博士 (Dr. Arathi Pai) 表示。

她与同事马塞尔·佩尔泽 (Marcel Pelzer) 一起于2019 年 11 月启动了 Jupiter 项目。他们的目标是:汇集所有自动驾驶相关创新。“保时捷工程公司的专家们正在许多基地共同推进这一领域的开拓性工作。”联合项目经理佩尔泽解释说,“为了更轻松地在不同项目中使用各种工具和已开发的功能,我们推动了这一平台设想。
凭借 Jupiter 加速研发
除了软件方面,Jupiter 也有脚踏实地的一面:在德国比蒂希海姆-比辛根、罗马尼亚克卢日-纳波卡和捷克布拉格,三辆配备有附加传感器系统的保时捷 Cayenne 测试车已经准备完全,即将开始在测试车道上检验各种新型功能和算法。这种组合未来将可大大加快研发人员的工作。在 Jupiter 的帮助下,他们希望能够更快地将新想法转化为所谓的最简可行产品 (minimum viable product, MVP),亦即新解决方案的首个有效版本,然后便可以立即开始在测试车道上加以试验和完善。甚至可以设想,客户也可使用 Jupiter 来检验自己的想法。
目标是在短时间内完成概念证明,也就是证明一个想法可以奏效,也许随着下面的进一步开发,就可臻于成熟,达到量产标准。“身在不同驻地的研发人员将可以同时发挥作用。”帕伊指出。我们的目标不仅是让自动驾驶变得可靠安全,而且还要开发出更多功能。“甚至包括一些我们以前从未设想过的东西。”派伊展望道。
开放式编程框架
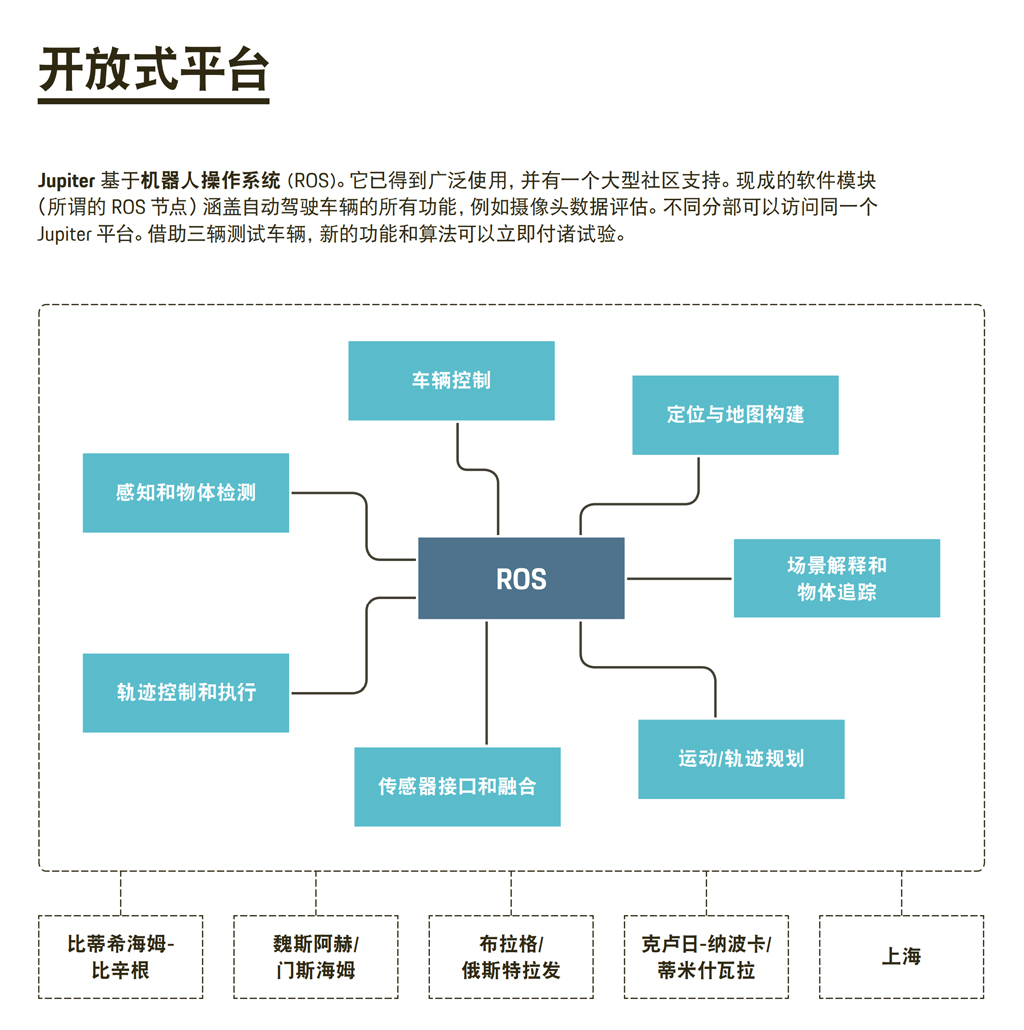
为了使新的解决方案在未来更容易从一个项目迁移到另一个项目,Jupiter 基于一种开放式编程框架:机器人操作系统 (Robot Operating System, ROS)。这一开源解决方案已得到广泛使用,并有一个大型社区支持,因此,出现问题时可以迅速找到解决方案。此外,ROS 还可提供许多现成接口,例如摄像头接口。支持 ROS 的传感器通常不需一小时即可在测试车上启用。
Jupiter 的核心是一种数字工具箱。该平台包含现成的软件模块,即所谓的 ROS 节点,它们涵盖自动驾驶车辆的所有功能。例如,一个节点负责评估来自摄像头以及其他各种传感器的数据,另一个节点确定车辆在空间中的位置,还有一个节点进行各种决策,例如改变车道。
人工智能应用于许多此类软件模块中,例如所谓“实例分割”的节点。其任务是识别周围环境中的物体并将之正确分类。为了做到这一点,人工智能会处理来自车载摄像头的图像,并用一个称为“边界框”(bounding box) 的边框来包围所检测到的物体。第二步便是将各个道路使用者分配到某个分组,比如“行人”、“乘用车”或“卡车”。
经过完善的功能节点
这一分类功能是自动驾驶的主要挑战之一,因为即使是最小的细节也可能导致错误评估。例如,一辆放置在行李架上的自行车可能被不成熟的算法误认作一辆正在移动的摩托车——这将导致自动驾驶车辆刹车。将来,Jupiter 将为开发者提供经过完善的 ROS 节点,用于实例分割以及其他各种功能。
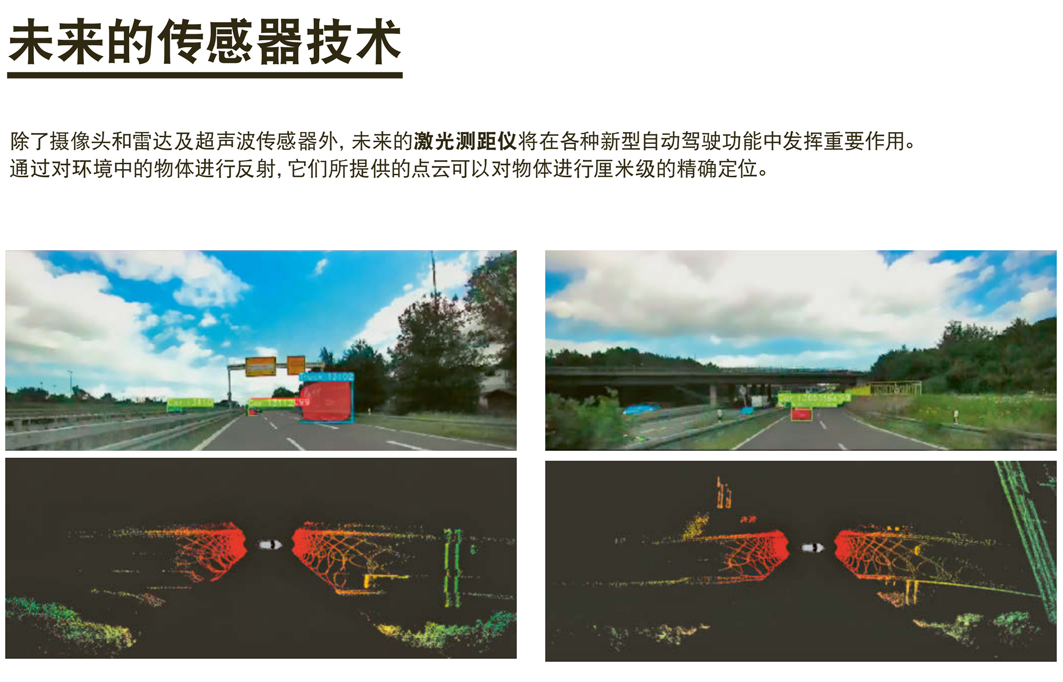
尤其对于自动驾驶而言,软件只是“八字一撇”。因为一个新想法究竟有多好,只有通过三辆测试车辆的现实运行才能见分晓。除了标准传感器外,它们在前部和后部还配备有激光雷达(LiDAR,光线探测和测距)。这些传感器每秒捕获 24 万个测量点,并可定位 250 米以外的物体,精度达到厘米级。测试车辆的光学雷达上还附带有一个立体深度摄像头,因为截至目前,光学系统在检测物体方面仍然优于激光雷达。

附加传感器技术的一点优势在于:开发者可以访问它们的原始数据。“这类硬件层面工作很重要,因为这使我们能够更加不受局限地采用已经实施的批量解决方案。”佩尔泽解释说。除了这类扩展传感器系统,测试车辆还拥有高性能计算机,车上安装了大量 CPU(传统微处理器)和 GPU(图形处理器)。各 CPU 负责与 ROS 节点的通信,GPU 则可快速训练和评估用于自动驾驶的神经网络。对时间要求严格的应用,通常来不及调用云端的外部计算能力。

通过 Jupiter,保时捷工程公司已在探索新的想法,如个性化自动驾驶。此举背后隐含的愿景是:在未来,车辆将适应其驾驶者的风格。为了使之成为可能,作为示例,自适应巡航控制系统 (Adaptive Cruise Control, ACC) 将首先观察道路状况,然后应用用户的习惯。如果驾驶者追求动感,算法就会适应这种行为;如果驾驶者喜欢开得更平顺放松,自动车距控制系统也会相应地考虑到这一点。为了能够实现此类个性化自适应巡航控制系统,开发人员必须首先收集不同驾驶方式的数据。为此,团队邀请了多名测试人员在城市和乡间驶过标准化测试环道。传感器记录了 6 TB 的数据,这些数据日后将用作个性化自适应巡航控制系统和各种未来辅助系统的学习材料。
有效的数据收集
佩尔泽强调说,只有使用像 Jupiter 这样的工具,他和同事才能有效地开展此类项目。这是因为,这种研究需要高精度的差分 GPS 数据,以及总线信号和摄像头原始数据。“如果采用三个独立的数据管道,时间同步将会非常繁琐。”他解释说,“另一方面,Jupiter 可以同时记录和存储所有数据。”通过这种方式,该平台将有助于使未来的自动驾驶汽车更加人性化。
数字枢纽正在迅速形成:启动约两年后,用于记录所有传感器数据的基本节点已经可用,更多功能也已进入原型阶段,并且即将完成。2021 年 8 月,三辆测试车辆投入使用,而在未来一年中,还将加入 OODA 架构的更多构件。OODA 这一缩写是指观察(Observe,处理摄像头和光学雷达数据)、定向(Orient,同时定位与地图构建)、决策(Decide,轨迹规划)和行动(Act,运动控制)等四大功能。
Jupiter 项目并不存在完成一说,因为模块库只会继续扩大。即使仅以目前的技术水平,也已能够密集运用 Jupiter,例如用于进一步开发自适应巡航控制以及所谓的变道切入检测,即检测准备变道切入的车辆。这将使保时捷工程公司能以最佳方式利用其专业知识库,并更快地掌握和研发各种新型自动驾驶功能。
版权信息
本文初刊于《保时捷工程杂志》2022 第 1 期
作者:Constantin Gillies


