
Sin embargo, los bucles de retroalimentación automáticos también son interesantes para otras funciones. CARIAD está avanzando activamente en el desarrollo del bucle de datos para una gran variedad de aplicaciones complejas.
Un conductor está aprendiendo constantemente y, con el tiempo, desarrolla una especie de intuición. Por ejemplo, si vas por el carril rápido y ves que un coche que te precede en el carril derecho se desplaza lentamente hacia la izquierda, soltarás automáticamente el acelerador, aunque el otro coche no haya puesto todavía el intermitente. Cualquier conductor experimentado sospecha que el otro coche está a punto de cambiar de carril.
¿Cómo puede un vehículo autónomo aprender de la experiencia de la misma manera y reaccionar “intuitivamente”? Porsche Engineering abordó esta cuestión junto con Porsche AG y CARIAD, una empresa de software y tecnología del Grupo Volkswagen, como parte de una prueba de Big Data Loop. Ahora los especialistas en software de CARIAD están impulsando dentro del Grupo el desarrollo para la producción en serie. La prueba pretendía demostrar cómo todas las funciones basadas en la inteligencia artificial (IA) pueden desarrollarse continuamente en el futuro. La solución se asemeja a un bucle: los datos del vehículo se transmiten de forma inalámbrica a la nube, donde se utilizan para seguir entrenando la IA. Después, el algoritmo mejorado se pone a prueba y el ciclo vuelve a comenzar.
Detectar los cambios de carril en una fase más temprana
El objeto de prueba del proyecto es un vehículo equipado con un sistema mejorado de control de crucero adaptativo (ACC). El sistema normal de asistencia al conductor de serie se encarga de mantener la distancia de seguridad con el vehículo que le precede. Para ello, el ACC debe detectar con antelación si otros usuarios de la carretera se interponen. El objetivo ahora es utilizar la IA para detectar precisamente este comportamiento en una fase más temprana:
.png)
En el vehículo de pruebas, una red neuronal desarrollada internamente se encarga de esta tarea, que se sigue entrenando continuamente con situaciones reales durante las pruebas de circulación. Esto crea un ciclo interminable de observación y aprendizaje que mejora continuamente el rendimiento del ACC. "Un cambio de carril probable se detecta entre medio segundo y un segundo antes, lo que en autopista equivale a 30 metros de recorrido", explica el Dr. Joachim Schaper, Director de IA y Big Data en Porsche Engineering.
Todos los vehículos modernos con sistemas de asistencia producen enormes cantidades de datos (Big Data), incluidas las señales de las cámaras evaluadas o la información de los sensores de radar, por lo que hay mucho material para entrenar a una red neuronal. Sin embargo, lo que parece una idea sencilla, resulta un verdadero reto a la hora de ponerla en práctica. "Por ejemplo, solo queremos registrar los datos que realmente ayudan al sistema a aprender", dice el director del proyecto Philipp Wustmann, experto en control longitudinal y lateral de Porsche Engineering. "Eso no es tarea fácil, porque los sensores de radar y las cámaras generan muchísimos datos, la mayoría de ellos no relevantes para la función que se está considerando". Circular por una autopista vacía, por ejemplo, no ofrece oportunidades de aprendizaje para un controlador de distancia. Además, evaluar todos los datos llevaría demasiado tiempo.
Por eso seleccionamos situaciones específicas de las que la IA puede aprender algo. Esta tarea la realiza el llamado SceneDetector en el Taycan de pruebas: este algoritmo utiliza las señales de cámara interpretadas en el bus del vehículo. No se trata de imágenes de vídeo en bruto, sino de información sobre qué objetos hay y a qué distancia están del vehículo. El SceneDetector filtra aquellas situaciones reales del tráfico en las que el ACC no reacciona de forma óptima, por ejemplo, cuando el vehículo que se cruza se detecta demasiado tarde o de forma incorrecta. Además, es técnicamente posible hacer que el programa registre lo que se conoce como “casos límite”, es decir, casos que raramente se dan en la conducción diaria. Imaginemos un vehículo que nos precede y se desvía de su carril sin llegar a salirse de él. El algoritmo podría registrar esta situación. Lo mismo ocurre si la cámara no detecta las marcas del carril. De esta detección de escenas específicas se encarga un software especial llamado Automated Measurement Data Analytics (AMDA).
Propagación de datos por simulación
Una vez que el SceneDetector ha encontrado cinco situaciones potencialmente instructivas, transmite a un servidor los datos correspondientes a través de la radio móvil. En la nube, aumenta la cantidad de material ilustrativo: para ello, los datos se introducen primero en una simulación que utiliza un motor de juego, la misma tecnología que usan los juegos de ordenador para generar sus imágenes. Con la ayuda del Centro Virtual de Pruebas ADAS de Porsche Engineering (Porsche Engineering Virtual ADAS Testing Center, PEVATeC), se pueden producir recorridos de prueba virtuales en los que los vehículos en el ordenador se comportan físicamente como los reales en el asfalto. La simulación da lugar a mediciones que se corresponden con las del bus del vehículo real.
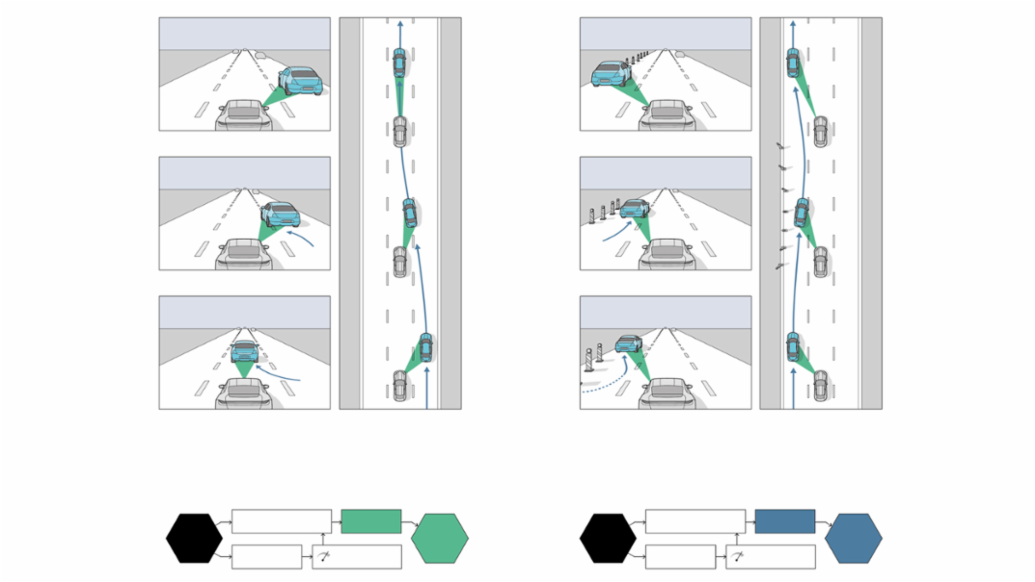
Ejemplos de casos
Verdadero positivo (izquierda): el sistema de detección debe predecir correctamente si otro vehículo está a punto de cambiar de carril. Si es así, el control de crucero adaptativo (ACC) puede frenar suavemente y con antelación.
Falso positivo (derecha): el sistema también debe detectar que un vehículo se está desviando hacia la derecha, pero aún así no se cruzará. Esto ayuda a evitar maniobras innecesarias de frenado.
En el entorno de simulación del PEVATeC se crean, también de forma automática, diferentes variantes del proceso registrado a partir de las mediciones reales, es decir, una resimulación de la situación real. En cada caso, los procesos simulados difieren solo mínimamente: en una versión, el otro usuario de la carretera se desplaza más rápidamente hacia la izquierda; en otra, se desplaza a una mayor distancia. Estas variaciones generan más datos de entrenamiento en muy poco tiempo, sin necesidad de realizar pruebas adicionales de circulación. También mejora el campo de aplicación del modelo de IA. No solamente reconoce las situaciones estándar, también las que ocurren con menos frecuencia. Esa es esencialmente la naturaleza de la tecnología: las redes neuronales adquieren nuevas habilidades exclusivamente a través de la observación. Cuantos más ejemplos vean, mejores serán. El entorno de simulación también permite recrear situaciones críticas o atípicas para ampliar la gama de datos de entrenamiento.
“Un probable cambio de carril se detecta entre medio segundo y un segundo antes, lo que equivale a 30 metros de recorrido en la autopista” Dr. Joachim Schaper, Director de IA y Big Data en Porsche Engineering
Una vez creadas todas las situaciones visuales, comienza el aprendizaje real. Todos los casos en que se produce un cruce del vehículo precedente, real o simulado, se utilizan para entrenar una red neuronal en la nube. Mediante la observación, aprende a reconocer los indicios de un próximo cambio de carril, de forma similar a un conductor humano. Esto permite al ACC frenar con suavidad, casi exactamente como un conductor humano. O como dice el experto Schaper: "Estamos replicando la intuición en la IA". A largo plazo, el vehículo podría desarrollar literalmente un sentido para el comportamiento de otros usuarios de la carretera y, por ejemplo, reconocer un estilo de conducción agresivo que sugiera cambios de carril arriesgados. Porsche Engineering utiliza la plataforma en la nube del Grupo Volkswagen (GroupMDM, donde MDM significa Measured Data Management) para almacenar y procesar los datos.
El conductor puede activar una nueva versión
Una vez finalizada la formación, se crea y valida automáticamente un nuevo software para el control de crucero adaptativo. Esto significa que debe ser capaz de reconocer de forma fiable durante las pruebas los cruces del vehículo precedente en un gran número de situaciones desconocidas. Solo si el software lo demuestra de forma inequívoca, se transfiere al vehículo. Entonces el conductor ve un cuadro de diálogo con el texto "Hay una nueva versión disponible. ¿Desea activarla?". Si el conductor pulsa "OK", el control de crucero adaptativo mejorado empieza a funcionar.
Formación y validación de nuevos modelos de IA
El nuevo modelo de IA se entrena automáticamente con un conjunto de datos mejorado y se compara con otro conjunto de datos existente. Si es mejor que el modelo anterior, se utiliza para nuevas pruebas en el vehículo.
.png/jcr:content/MicrosoftTeams-image%20(2).png)
También sería posible probar primero en el vehículo el nuevo módulo ACC en segundo plano (ShadowMode): durante la marcha, el modelo mejorado recibe los mismos datos de los sensores que el sistema instalado y debe reaccionar en consecuencia. Sin embargo, el antiguo ACC sigue controlando el acelerador y el freno. Mientras tanto, el software controla la validez de las predicciones. Si, por ejemplo, la IA "avanzada" predice un proceso de frenado que no se produce ("falso positivo"), sería descalificada. Solo cuando queda claro que la red neuronal entrenada en la nube es realmente superior en sus predicciones, entra en funcionamiento.
.png)
En esta prueba de concepto, la pulsación de un botón por la que el conductor activa la nueva versión del ACC representa el único paso manual en el ciclo de aprendizaje. "La novedad es que todo está automatizado", subraya Schaper. El reconocimiento de las situaciones relevantes en el vehículo se produce sin intervención humana, al igual que la propagación de las situaciones de aprendizaje en el entorno de simulación. Un ordenador también controla el entrenamiento de la red neuronal en la nube y la actualización en el vehículo. Los desarrolladores solo comprueban las cosas. "El vehículo se optimiza a sí mismo", resume Wustmann.
Prueba de concepto en solo cuatro meses
Porsche Engineering consiguió implantar el sistema de control de crucero adaptativo con autoaprendizaje en solo cuatro meses. Se presentó una solicitud de patente para parte de la tecnología. La prueba de concepto demostró que el enfoque técnico funciona. La arquitectura utilizada aquí ya se está empleando en otros proyectos de desarrollo, por ejemplo, para probar y validar una nueva generación de sensores en sustitución de los existentes. El siguiente paso será llevar el Big Data Loop a la producción en serie. En este sentido, aún quedan algunos retos por superar, como la detección de casos límite o la optimización totalmente automatizada de funciones. CARIAD está trabajando actualmente en una aplicación en serie del Big Data Loop en el contexto general de la circulación automatizada para las marcas del Grupo Volkswagen. Esta prueba de concepto proporcionará información valiosa.
Una vez que la tecnología necesaria sea estándar en todos los vehículos entregados, el aprendizaje también será más rápido porque habrá más material visual digital. Mientras que hoy en día un solo vehículo de pruebas está en la carretera recogiendo maniobras de cruce, en el futuro todos los coches podrán enviar datos al fabricante si el cliente está de acuerdo. El director del proyecto, Wustmann, está entusiasmado con esta perspectiva: "Recibir información directa de las flotas de clientes de diferentes países ahorraría una inmensa cantidad de tiempo, dinero y pruebas".
“La tecnología también puede ser interesante en el guiado lateral, por ejemplo, para el sistema de mantenimiento de carril" Philipp Wustmann, Director de Proyecto para Control Longitudinal y Lateral en Porsche Engineering
El reconocimiento de cruces representa solo una parte del camino hacia un vehículo de aprendizaje permanente. En el futuro, las redes neuronales se utilizarán en muchos lugares del automóvil, y todos ellos podrían mejorarse mediante bucles de retroalimentación automática. "La tecnología también podría ser interesante para el guiado lateral, por ejemplo, para el sistema de mantenimiento de carril", informa Wustmann.
En resumen
El Big Data Loop permite el desarrollo continuo de las funciones del vehículo basadas en la IA. El enfoque ha demostrado su eficacia en una prueba de concepto y ya se está utilizando en otros proyectos de desarrollo. Podría ser un paso importante hacia el vehículo de aprendizaje permanente.
Cariad
El punto de partida para poder optimizar de la mejor manera posible el Big Loop es una extensa base de datos. Y aquí, Porsche planeta una gran ventaja debido a su cooperación con otras marcas del Grupo Volkswagen, ya que tiene acceso a la enorme base compartida de datos de software, centralizada en la empresa I Am Digital (de la compañía Cariad). Con todos estos datos, se desarrollan sistemas y funciones que reciben su ADN distintivo por parte de los ingenieros de Porsche: los sistemas de asistencia aumentan la seguridad y la comodidad. Pueden aliviar la conducción en situaciones de tráfico, ayudar con el estacionamiento e incluso actuar como entrenadores. Sin embargo, la decisión sigue siendo individual y la conducción autónoma es siempre una opción con Porsche.
Información
Texto: Constantin Gillies
Colaboradores: Philipp Wustmann, Dr. Joachim Schaper
Ilustraciones: Florian Müller
Artículo publicado en el número 2/2021 de la revista Porsche Engineering.



